
Anyone looking for an efficient and space-saving solution for typical movement sequences that occur in handling and assembly technology, such as turning, swiveling, screwing, rolling or coiling, may be interested in the swiveling-rotary modules of the ForTorque series from the kinematics specialist JA² (Jung Antriebstechnik u. Automation) based in Wettenberg, Germany. This is because the slimline infinite rotary units are ideal for the highly dynamic rotation of large, high-inertia workpieces and eccentric grippers as well as for use in screwing and coiling technology.
Turning, swiveling, screwing, coiling
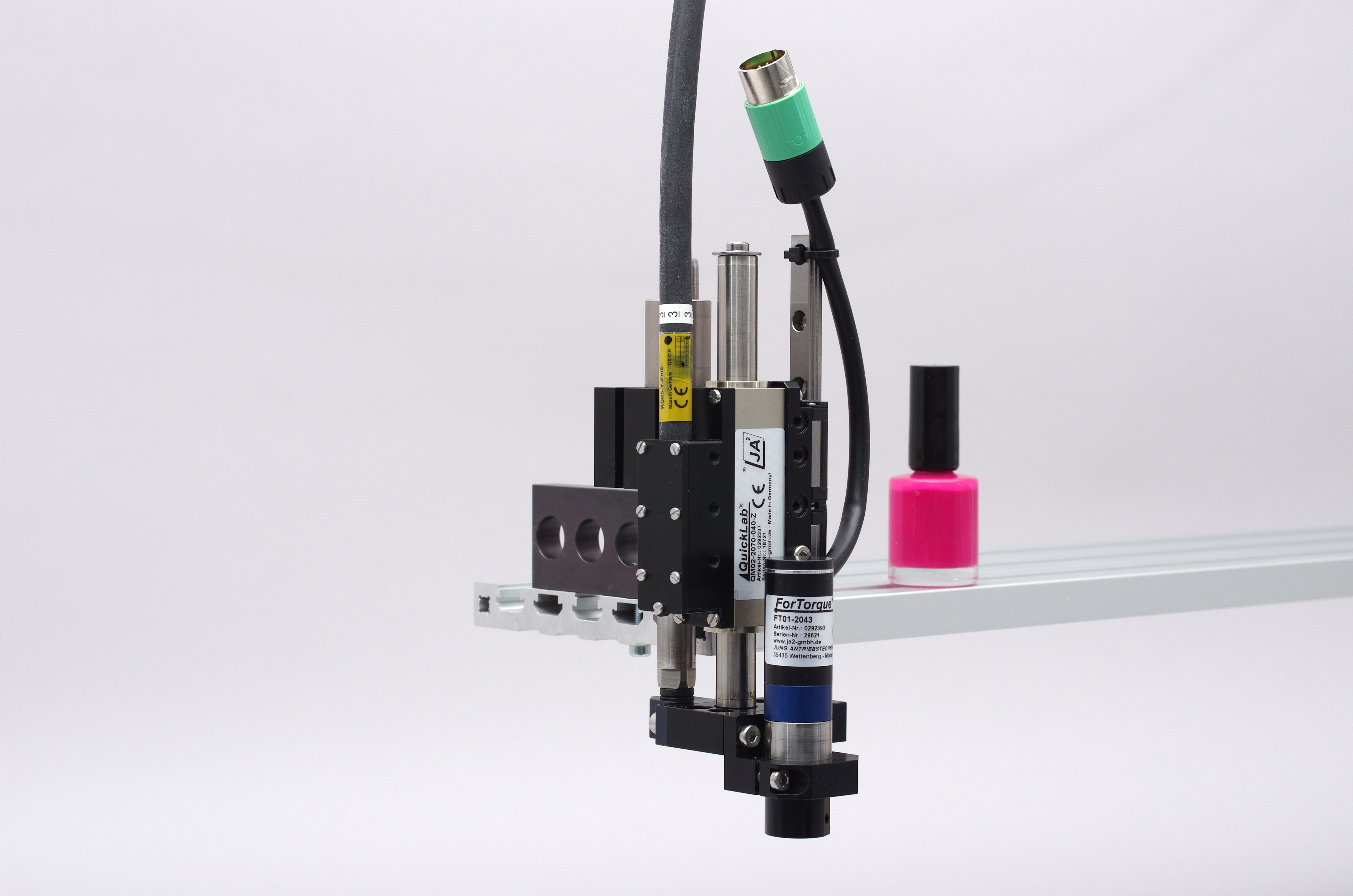
A typical application case for the miniature swiveling-rotary modules is, for example, screwing the caps on small cosmetics or pharmaceutics containers in constrained spaces on fully automated packaging lines. The modules are also suitable in cases where grippers or workpieces need to be swiveled, e.g. when assembling or separating products. Designed as a modular system, six sizes with diameters of 16, 20, 25, 35, 40 and 45 mm are available. This covers peak and continuous torques of 0.3 and 0.14 Nm to 4.0 and 2.6 Nm respectively. The inertias of the load may be between 2.0 and 200 kgcm². This provides the most suitable solution for accurately angled movement and positioning for a wide range of different handling and assembly tasks.
To reduce the load on the output shaft of gearheads in the case of high external moments of inertia, the output plate of the four larger module models has an extremely rigid bearing consisting of two thin-section bearings. Furthermore, the swiveling-rotary module with 40 mm diameter can additionally be equipped with a fluidic rotary joint for pneumatics or vacuum, e.g. to supply a pneumatic gripper with compressed air. The kinematics specialists push the modular concept even further: An interesting possibility is to combine the fast rotary units with linear axes, e.g. of the QuickLab series. Matching adapter plates are available as accessories. The result are compact lift-rotary or lift-swiveling systems through to five-axis handling systems.

High dynamics and precision
"The drives are the heart of our modular automation system and the requirements placed on them are very high," explains Wilhelm Jung, Managing Director at JA². "The motors must operate highly dynamically, be precisely controllable and have suitable dimensions." In the case of the ForTorque modules, for example, the brushless DC-motors of the B and BX4 series from FAULHABER proved convincing. The motors with their two-pole and four-pole technology are extremely compact. The used variants of the B series with diameters of 16, 20 and 35 mm are just 28, 36 and 68 mm long respectively, but deliver continuous torques of up to 168 mN in the case of the largest variant. Similar also applies to the BX4 series. "Here we use motors with 22 mm or 32 mm diameter and continuous torques of 18 and 53 mNm respectively," reports Wilhelm Jung.
The motors are used in the ForTorques up to speeds of 8,000 rpm. Different gearheads, including zero backlash planetary gearheads from FAULHABER, provide gear reduction. Ultimately, the gearhead technology with the respective maximum input speed determines the limit for the maximum motor speed. "We then select the reduction ratio according to the application," continues Wilhelm Jung. "In this way, we can influence the extent to which the external moment of inertia is reduced by the square of the reduction. The motor can then be precisely regulated unaffected by the lever. When selecting the gearheads, we paid particular attention to the efficiency of the gearheads. Because the better the efficiency is, the more precisely the torque applied at the gearhead output can be determined from the motor current. This is a key feature particularly in the case of screwing applications where delicate (plastic) parts need to be screwed on with a defined torque."
Single-cable technology for fault-free control
All swiveling-rotary modules are connected and controlled using a standardized bayonet connector, single-cable technology and a motion controller. In automation systems, however, the switch cabinet is usually some distance from the actual drive. "Between the motor and the controller in the separate switch cabinet, there can then be 10, 20 or more meters," says Wilhelm Jung. There is therefore a special, multi-shielded cable that transfers the motor power and the position sensor signal between motor and controller up to 30 m without interference. The cable is fastened with strain relief, can be plugged in and is also designed for use with cable chains, i.e. for mobile use. Moreover, thanks to the available preassembled cable sets, the single-cable technology simplifies installation.
With the motion controllers, the user has the choice because the used motors are compatible with different controllers. "We also offer motion controllers from FAULHABER," adds Wilhelm Jung. The two companies have, after all, enjoyed successful collaboration for many years. In the above-mentioned QuickLab linear axes, for example, the DC linear drives LM2070 and LM1247 are used. They are not designed as classic "surface rotors" with carriages and guides. Instead, the forcer rod is guided within a 3-phase self-supporting coil. "This design produces an exceptionally good relationship between linear force and current and high dynamics. In addition, there are no cogging torques, thereby making the linear motors ideal for use in our modular QuickLab system," concludes Wilhelm Jung.



